一目均衡表の三役好転・三役逆転は、トレンド判断の王道シグナルです。
特に裁量トレードでMT4を使っているFXトレーダーにとって、重要な判断材料になります。
- 気づいた時にはすでに出遅れている
- 条件が揃ったか自信が持てない
- 複数時間足の確認が面倒
といった理由で、正しいシグナルを見逃してしまうケースも少なくありません。
そこで本記事では、MT4上で三役好転・三役逆転を自動で矢印表示する無料インジケーターを紹介します。
※ 簡易ロジックで作成した検証用インジケーターです。実運用は自己責任でご利用ください。
📈 一目均衡表とは?
一目均衡表は、相場のトレンドやバランスを判断するための指標です。
ただし、三役好転・三役逆転を正しく使うには、 各線の意味や関係性を理解しておくことが重要です。
👉 一目均衡表の見方・使い方を詳しく知りたい方はこちら
▶ 一目均衡表とは?初心者向けに仕組みと見方を解説
インジケーターの仕様と判定ロジック
本インジケーター「一目サポート」は、
一目均衡表における三役好転・三役逆転の成立条件のみを自動判定し、
MT4チャート上に矢印でシグナルを表示します。
裁量トレードで見落としやすい
「転換線・基準線」「価格と雲」「遅行スパン」の関係を、
すべて同時に満たした場合のみシグナルが出る仕様です。
判定条件の概要
三役好転(ロング)
- 転換線 > 基準線
- 価格が雲の上
- 遅行スパンがローソク足の上
三役逆転(ショート)
- 転換線 < 基準線
- 価格が雲の下
- 遅行スパンがローソク足の下
いずれか1つでも条件を満たさない場合、
シグナルは表示されません。
注意点
エントリーを指示するものではなく、
トレンド方向を視覚的に把握する補助ツールです
判定は確定足ベースで行われます
MT4チャート上での表示例(矢印シグナル)

一目サポートをMT4のチャート上に適用させると、こんな感じで青矢印(三役好転のロングシグナル)と赤矢印(三役逆転のショートシグナル)で表示し時間足レベルでトレンドを視覚化しています。
一目均衡表自体は表示されないのでイメージのようにしたい場合は以下のように一目均衡表のインジケータをMT4上に追加してください。
三役好転・三役逆転の判定条件
三役好転(ロング)
三役好転となった場合に、青矢印(ロングシグナル)を表示します。
A.転換線が基準線を上抜けたとき
B.遅行スパンがローソク足を上抜けたとき
C.ローソク足が雲を上抜けたとき
※A~Cが全て一致した場合は三役好転で買いサイン
三役逆転(ショート)
三役逆転となった場合に、赤矢印(ショートシグナル)を表示します。
A.転換線が基準線を下抜けたとき
B.遅行スパンがローソク足を下抜けたとき
C.ローソク足が雲を下抜けたとき
※A~Cが全て一致した場合は三役逆転で売りサイン
パラメータ設定(Ichimoku標準)
パラメータは基本的にインジケータの『一目均衡表』と同じです。
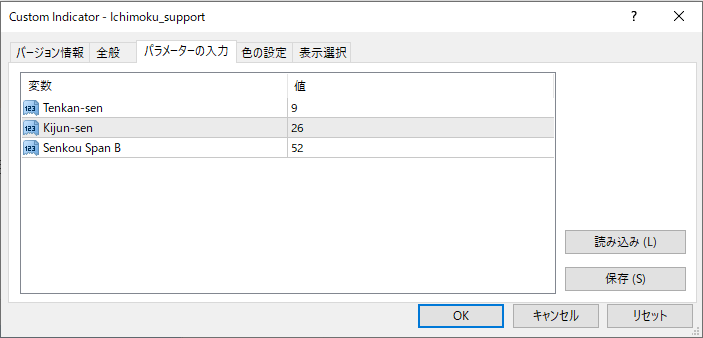
- Tenkan-sen = 9 ⇒ 転換線の期間です
- Kijun-sen = 26 ⇒ 基準線の期間です
- Senkou Span B = 52 ⇒ 先行スパンBの期間です
一目均衡表インジケータ―と合わせましょう。
インジケーターのダウンロード方法
『一目サポート』のソースコードを載せていますのでコンパイルして作成する事もできますが、一応コンパイル済のファイルもダウンロードできるようにしました。
📥 一目均衡表サポートインジをDL※以下は、別のインジケーターを探したい方向けの参考リンクです。
\ 国内最大級のインジケータープラットフォーム /
GogoJungle(ゴゴジャン)でインジケーターの評価・レビューをチェック!
ダウンロードした『一目サポート』を、MT4へ適用の仕方が分からない方はこちらの記事をご覧ください。

ソースコード
『一目サポート』のソースコードです。
//+------------------------------------------------------------------+
//| ichimoku_support.mq4 |
//| Copyright 2020, MetaQuotes Software Corp. |
//| https://www.mql5.com |
//+------------------------------------------------------------------+
#property copyright "Copyright 2020, MetaQuotes Software Corp."
#property link "https://www.mql5.com"
#property version "1.00"
#property strict
#property indicator_chart_window
//+------------------------------------------------------------------+
//| Custom indicator initialization function |
//+------------------------------------------------------------------+
//---- indicator settings
#property indicator_chart_window
#property indicator_buffers 2
#property indicator_color1 Blue
#property indicator_color2 Red
//--- input parameters
input int InpTenkan=9; // Tenkan-sen
input int InpKijun=26; // Kijun-sen
input int InpSenkou=52; // Senkou Span B
double CrossUp[];
double CrossDown[];
int OnInit()
{
IndicatorDigits(Digits);
//--- indicator buffers mapping
ArrayInitialize(CrossUp,EMPTY_VALUE);
SetIndexBuffer(0,CrossUp);
SetIndexStyle(0,DRAW_ARROW,EMPTY);
SetIndexArrow(0,228);
ArrayInitialize(CrossDown,EMPTY_VALUE);
SetIndexBuffer(1,CrossDown);
SetIndexStyle(1,DRAW_ARROW,EMPTY);
SetIndexArrow(1,230);
//---
return(INIT_SUCCEEDED);
}
//+------------------------------------------------------------------+
//| Custom indicator iteration function |
//+------------------------------------------------------------------+
int OnCalculate(const int rates_total,
const int prev_calculated,
const datetime &time[],
const double &open[],
const double &high[],
const double &low[],
const double &close[],
const long &tick_volume[],
const long &volume[],
const int &spread[])
{
//---
int limit=rates_total-prev_calculated;
//---- main loop
for(int i=1; i<limit; i++)
{
// 安全チェック
if(i + 26 >= rates_total || i + 10 >= rates_total)
continue;
double AvgRange = 0;
//---- 矢印位置調整
for(int counter = 0; counter < 10; counter++)
{
AvgRange += MathAbs(high[i + counter] - low[i + counter]);
}
double Range = AvgRange / 10.0;
//***一目均衡表の値取得***//
double Tenkansen = iCustom(NULL,0,"Ichimoku",InpTenkan,InpKijun,InpSenkou,0,i);
double Kijunsen = iCustom(NULL,0,"Ichimoku",InpTenkan,InpKijun,InpSenkou,1,i);
double SenkouSpanA = iCustom(NULL,0,"Ichimoku",InpTenkan,InpKijun,InpSenkou,2,i);
double SenkouSpanB = iCustom(NULL,0,"Ichimoku",InpTenkan,InpKijun,InpSenkou,3,i);
double ChikouSpan = iCustom(NULL,0,"Ichimoku",InpTenkan,InpKijun,InpSenkou,4,i+26);
double rosokuValueClose = iClose(NULL, 0, i);
double rosokuValueHighP = iHigh(NULL,0,i+26);
double rosokuValueLowP = iLow(NULL,0,i+26);
//△三役好転△
if(Tenkansen > Kijunsen && SenkouSpanA < rosokuValueClose && SenkouSpanB < rosokuValueClose && ChikouSpan > rosokuValueHighP){
//ロングエントリー
CrossUp[i]=Low[i]-Range*1.0;
}
//▼三役逆転▼
else if(Tenkansen < Kijunsen && SenkouSpanA > rosokuValueClose && SenkouSpanB > rosokuValueClose && ChikouSpan < rosokuValueLowP){
//ショートエントリー
CrossDown[i]=High[i]+Range*1.0;
}else{
//何もしない
}
}
//--- return value of prev_calculated for next call
return(rates_total);
}
//+------------------------------------------------------------------+
さいごに(改善版)
一目均衡表の三役好転・三役逆転は、
トレンドが「整った状態」かどうかを判断するための指標です。
しかし実際のトレードでは、
すべての条件を毎回正確に確認するのは意外と手間がかかり、
判断が遅れたり、主観が入りやすくなる場面も少なくありません。
本インジケーターは、
そうした判断のブレを減らし、相場の状態を視覚的に把握するための補助ツールとして作成しました。
あくまで「エントリーを決めるための最終判断」はトレーダー自身が行い、
環境認識やフィルターの1つとして活用するのがおすすめです。
一目均衡表を軸にしたトレードや、
三役好転・三役逆転を使ったEAロジックに興味がある方は、
下記の関連記事も参考にしてみてください。
※ 三役好転・三役逆転のシグナルをEA(自動売買)に落とし込んだ検証例

💡 このサンプルをベースにしたカスタマイズ相談も可能です。
▶ 仕様相談・EA作成の詳細はこちら
✅ 今回のロジックをベースにしたEAサンプルも多数公開中
今回紹介したようなEAの実装例・考え方をベースに、
当サイトではさまざまなFX自動売買EAのサンプルコードを公開しています。

ロジックの違いや設計の考え方を比較しながら、
自分に合ったEA構成を探したい方はぜひチェックしてみてください。
📊 EA運用・検証フェーズに進みたい方へ
今回のような仕組みを理解したうえで、
「実際にどのEAが安定しているのか」「検証データではどんな差が出ているのか」
を確認したい方は、以下の記事も参考になります。

⚙️ 同じ条件でバックテストしたい方へ(検証環境)
当サイトのバックテストは、同一の検証環境で比較できるように統一しています。
EAの再現テストやパラメータ検証を行う場合は、
検証環境の作り方もあわせて確認しておくと理解が深まります。

EA開発初心者向けに、今後も実践的に使えるMQL4関数や実装例を紹介していきます。
気になる機能やロジックがあれば、用途別に整理した関連記事もぜひあわせてご覧ください。
コメント